产品资讯、最新服务、合作咨询

联系方式18500214892(全球销售总监 梁先生)18611191608(全球/国内华北区 王女士) 18605655239(国内华中/华南区 汪先生)



解决方案通过端到端的自主流程,实现挖掘机的无人化操作
适用于矿山排土场等恶劣环境,提升作业的安全性和效率。
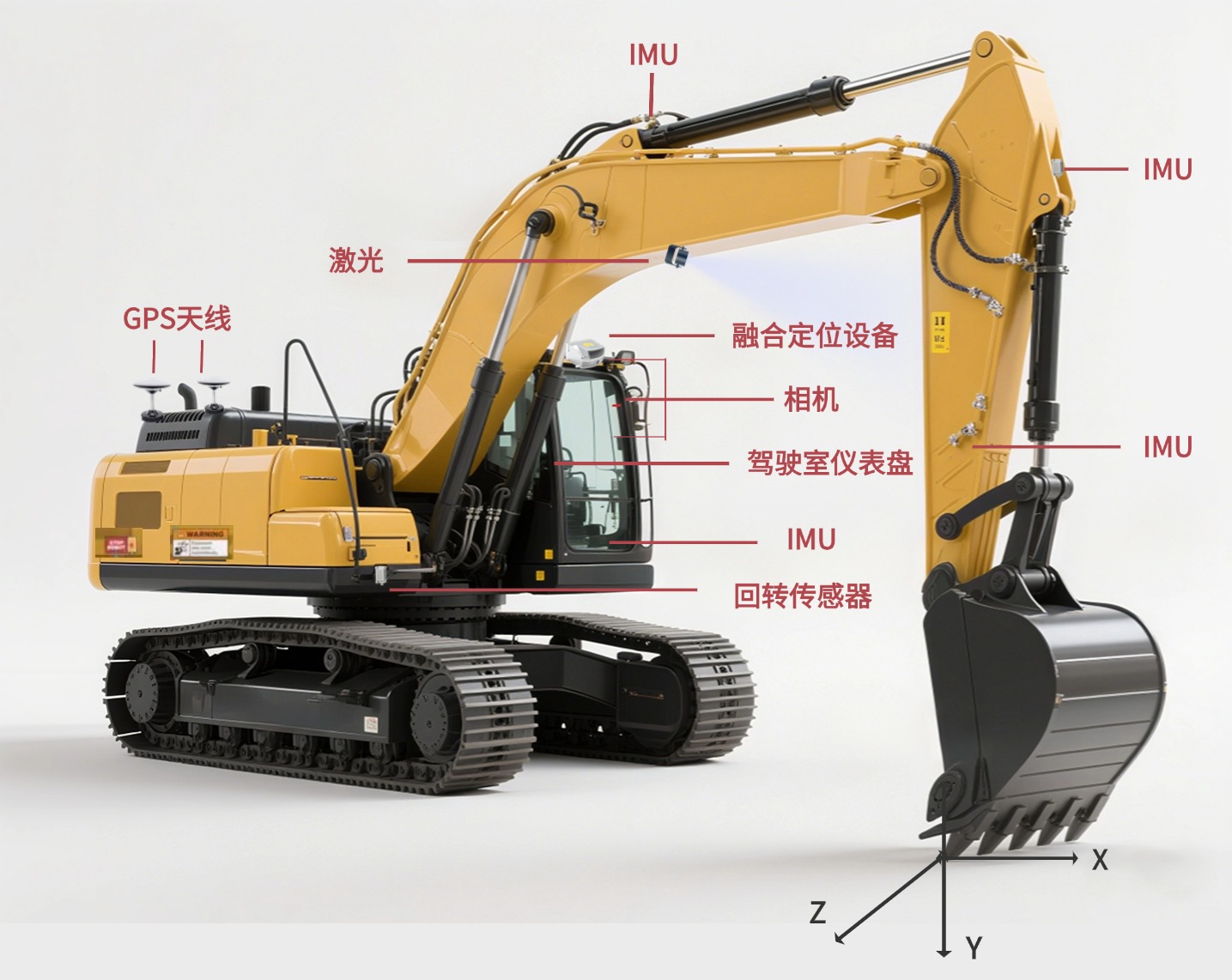
AI智能挖机产品配件示意图

矿山开采与排土场作业

建筑工地基础挖掘

灾害救援与清理

灌溉沟渠挖掘

基础设施建设
HEADQUARTERS
公司地址:安徽省合肥市庐阳区大数据产业园22栋2层205室
联系电话:合肥总部
BEIJING BRANCH
公司地址:北京市海淀区安宁庄西路9号院29号楼能+中心富地710室
联系电话:北京分公司





market@polyax.cn
Copyright © 2025. 博立智新(合肥)智能科技有限公司